
graver cnc shield v3, imprimante 3D, A4988, panneau d’extension pour Arduino
2,300.00د.ج
متوفر في المخزون
- Paquet: standard
- Numéro de Modèle: standard
- Température de fonctionnement: standard
- Puissance de dissipation: standard
- Tension d’alimentation: standard
- Application: standard
- Condition: Nouveau
- Type: RÉGULATEUR DE TENSION
- Nom de marque: NoEnName_Null
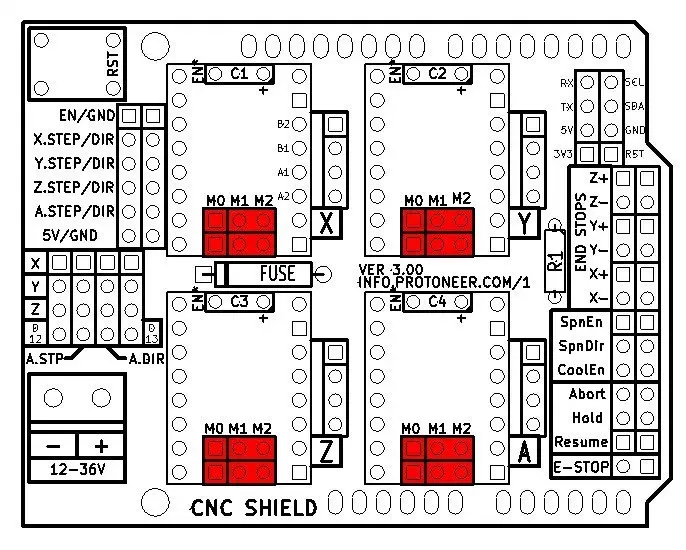
II.UNOEt moduleIOCorrespondance entre le port de présentation
Les besoins de base de la commande du moteur pas à pas d’autres broches sont dans la machine à graver, ou3DQuand l’imprimante a été utilisée, ici nous ne faisons pas de détail,IOIl correspond à la figure ci-dessus.
Carte d’extension UNO
8 pouces (activation du moteur pas à pas, actif faible)
7. Z.DIR (contrôle de direction de l’axe Z)
6 Y.DIR (contrôle de direction de l’axe Y)
5 X.DIR (contrôle de direction de l’axe X)
4 Z. Étape (commande pas à pas de l’axe Z)
3. Étape Y. (commande pas à pas de l’axe Y)
2 X. Étape (commande pas à pas de l’axe X)
// Voici une procédure de contrôle de moteur pas à pas simple,
# Définir EN 8 // activation du moteur pas à pas, actif faible
# Définir X_DIR 5 // axe X moteur pas à pas contrôle de direction
# Définir Y_DIR 6 // contrôle de direction du moteur pas à pas de l’axe y
# Définir le contrôle de direction du moteur pas à pas Z_DIR 7 // axe z
# Définir X_STP 2 // contrôle pas à pas de l’axe x
# Définir Y_STP 3 // contrôle pas à pas de l’axe y
# Définir Z_STP 4 // contrôle pas à pas de l’axe z
/*
// Fonction: fonction de pas: pour contrôler la direction du moteur pas à pas, le nombre de pas.
// Paramètres: commande de direction dir, broche DIR correspondant au moteur pas à pas, broche pas à pas correspondant au moteur pas à pas, pas à pas de quelques pas
// Pas de valeur de retour
*/
Pas de vide (boolean dir, byte dirPin, byte stepperPin, int step)
{
Écriture numérique (dirPin, dir);
Délai (50);
Pour (int i = 0; i
Écriture numérique (stepper pin, haut);
Delaymicrosecondes (800);
Écriture numérique (stepper pin, LOW);
Delaymicrosecondes (800);
}
}
Configuration vide () {// le moteur pas à pas utilisé dans la broche IO est réglé pour sortir
PinMode (X_DIR, sortie); pinMode (X_STP, sortie);
PinMode (Y_DIR, sortie); pinMode (Y_STP, sortie);
PinMode (Z_DIR, sortie); pinMode (Z_STP, sortie);
PinMode (EN, sortie);
Écriture numérique (EN, faible);
}
Boucle vide () {
Pas (faux, X_DIR, X_STP, 200); // tour d’inversion du moteur d’axe X, 200 pas pour le cercle
Pas (faux, Y_DIR, Y_STP, 200); // tour d’inversion du moteur de l’axe y, 200 pas pour le cercle
Pas (faux, Z_DIR, Z_STP, 200); // tour d’inversion du moteur de l’axe z, 200 pas pour le cercle
Délai (1000);
Pas (vrai, X_DIR, X_STP, 200); // le moteur de l’axe X est transféré tour, 200 pas à cercle
Pas (vrai, Y_DIR, Y_STP, 200); // le moteur de l’axe y est transféré tour, 200 pas à cercle
Pas (vrai, Z_DIR, Z_STP, 200); // le moteur de l’axe z est transféré tour, 200 pas à cercle
Délai (1000);
}
منتجات ذات صلة
-
support Batterie 9V
السعر الأصلي هو: 200.00د.ج.180.00د.جالسعر الحالي هو: 180.00د.ج. -
Mini feu de signalisation pour Arduino
180.00د.جإضافة إلى السلةMini feu de signalisation pour Arduino, Module d’affichage, rouge, jaune, vert, 5mm, rvb, modèle de système de feux de circulation, 5V
-
MOTEUR BRUSHLESS sans balais A2212, pour avion RC, pour multi-coptères, 930KV 1000/1400/1800/2200/2700KV
1,950.00د.ج – 2,500.00د.جتحديد أحد الخيارات هناك العديد من الأشكال المختلفة لهذا المنتج. يمكن اختيار الخيارات على صفحة المنتجNom de marque: Real …